Master Thesis - Algorithm for Landing and Uprighting the MMX Rover with Gyroscopes
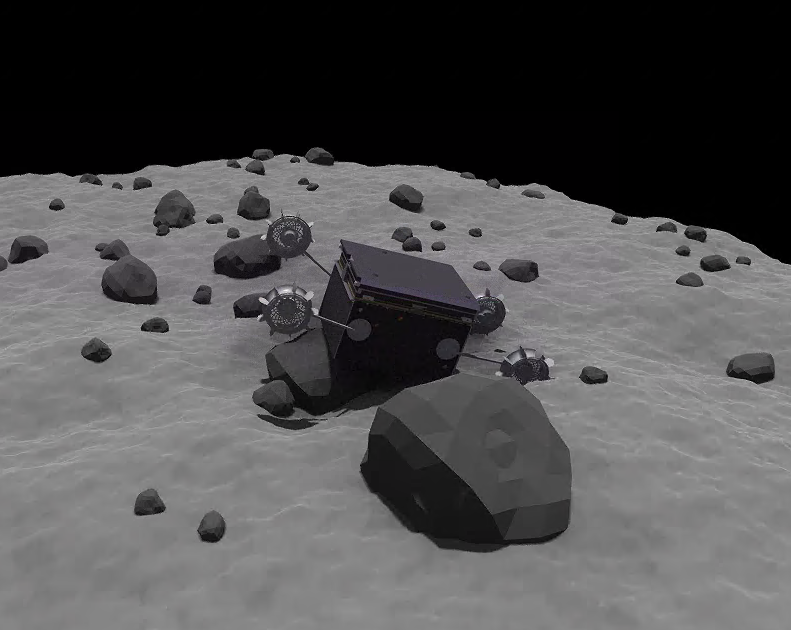
Abstract The Martian Moons eXploration (MMX) mission is planned by the Japanese space agency JAXA and will travel to Mars and its moons Phobos and Deimos. The main objective of the spacecraft is to collect a sample from Phobos. As a part of this Mission a small rover will be used to de-risk the main probe by letting it explore Phobos prior to touch down. This rover is developed by CNES and the DLR and will be released from the spacecraft approximately 50m above ground where it will then fall onto Phobos.